Index:
Inverted cart-pendulum system with swinging up control
On system modelling and control
Modelled linearized and non-linear dynamics of a cart-pendulum (inverted) system with swinging up capability. Simulated it and compared different controller (LQR/LQE/LQG) implementation.
Used
A novel design for drive simulators
On manipulator design
Created a 3D model of a 3-RRRS 6-DOF parallel manipulator with decoupled kinematics. Reduced the total cost of manufacturing by at least 20% and increased the available workspace. Machined individual parts from aluminum blocks in machine shop and assembled them in the laboratory.
Used
Self-assembling structures using Multi-Robot System
On multi-robot behaviour
Developed and simulated a randomly scattered collective of robots with minimal lidar-like sensors, to self-assemble into any given connected shape with variable scale, using gradient information derived from the desired shape.
This project was inspired by:
Michael Rubenstein. Self-Assembly and Self-Healing for Robotic Collectives. PhD Dissertation, Dec 2009.
Used
Modeling and Control of Lateral Vehicle Dynamics
On Self-driving vehicles
Modelled lateral dynamics of a car with steering angle and differential braking as inputs; performed frequency analysis; and derived LQR, Kalman Filter, and H ∞ control for the lateral velocity and heading angle.
Used
Interactive user interface for robotic arm dynamics and control
On industrial robot arm modelling
Built an application from scratch to design serial manipulator dynamics and indirect force control through compliance and impedance control, with user-defined input parameters like link lengths and joint types.
Used
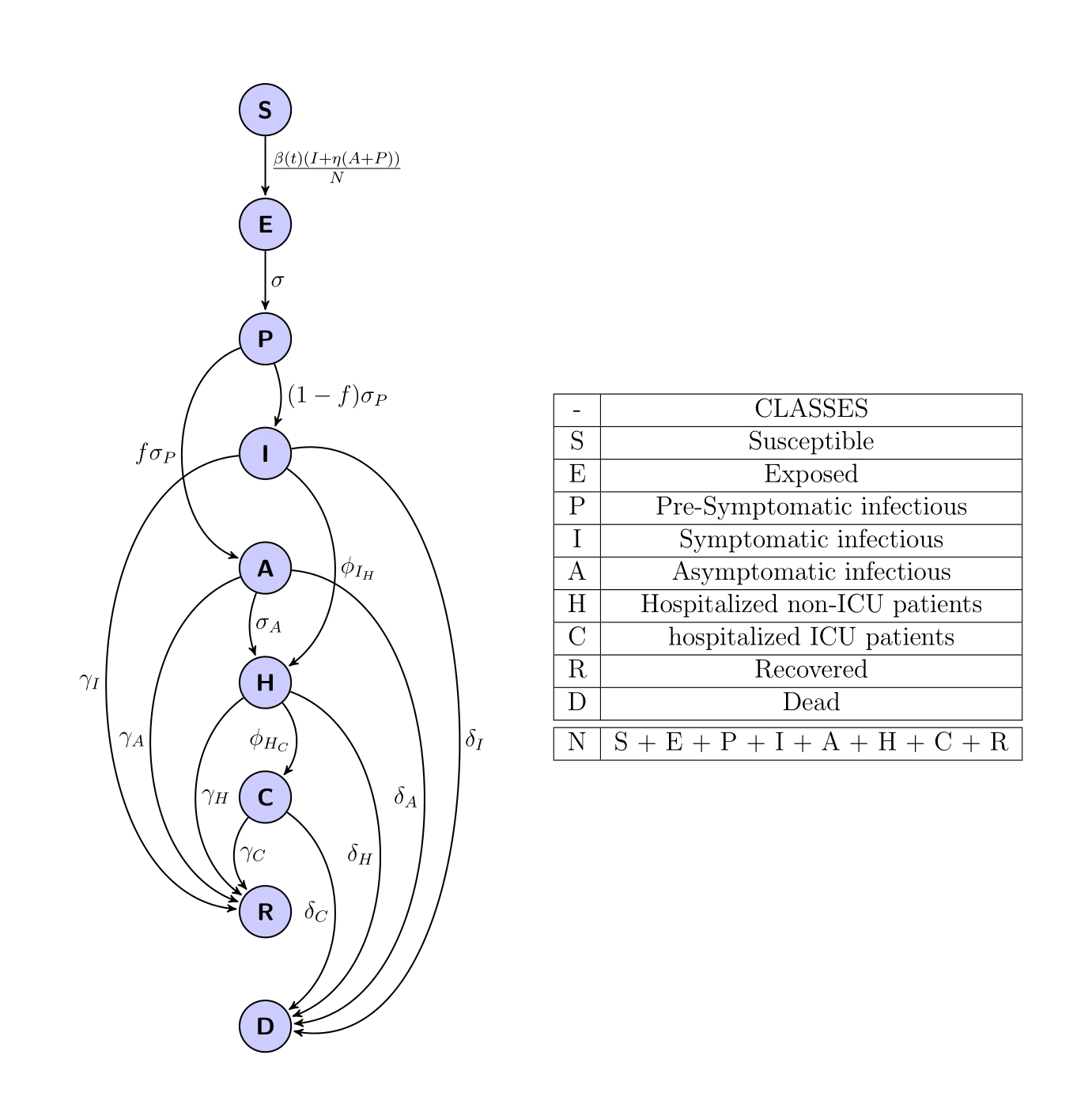
Modeling and Simulation of Control Strategies: Spread of the Novel Coronavirus
On compartmental system modelling and control
Created a non-linear dynamical system model to define spread of SARS-CoV-2 and fit the model to the data. Evaluated the conditions to achieve global asymptotic stability of the system (disease free equilibrium). Simulated possible futures with model parameter uncertainties, and for different control strategies.
medRxiv paper preprint: doi.org/10.1101/2020.05.11.20098418
Used
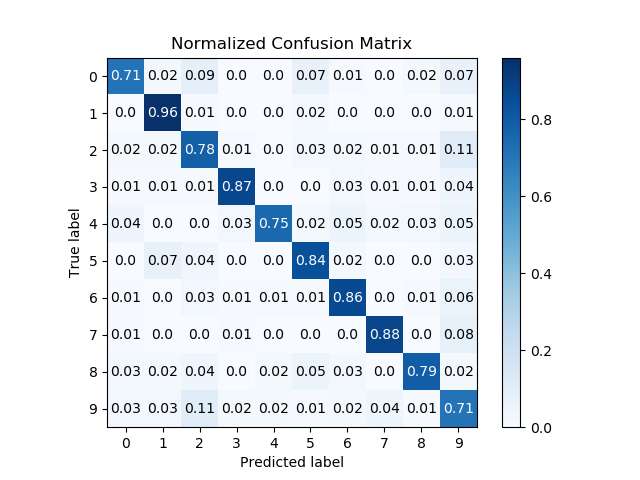
Audio Signal Classification using Convolutional Neural Networks
On deep neural networks
Extracted features and classified GTZAN Music Dataset via Neural networks with reduced number of parameters. Used significant feature functions (librosa package), amplitude data (1D-CNN), and Spectrogram (2D-CNN). Achieved a maximum of 81.62% classification accuracy using 1D-CNN.
Used
Control-relevant system identification of a Dorr-Oliver lime mud reburning calciner
On system identification
Designed an experiment under open-loop “plant-friendly” conditions, using PRBS & multisine input signals, to obtain a full-order model of the system satisfying classical validation criteria. Fit restricted complexity ARX and Output Error models to open-loop data with prefilters and compared it. Obtained a control-relevant ARX model by applying control-relevant prefiltering on the full-order model identified.
Used
Optimal Decentralized Structure for H∞ Full State Feedback Controllers
On optimal controller design
Formulated a methodology to find an optimal block diagonal matrix structure for the controllers, allowing the control to be decentralized. Solved Linear Matrix Inequalities as a Convex Optimization Problem.
Used